
Darren M. Chan
I am a Principal Investigator and Technical Program Manager at HRL Laboratories (formerly Hughes Research Lab) in Calabasas and Malibu, California. My research and development activities primarily focus in advanced manufacturing systems (in collaboration with the Boeing Company) and autonomous vehicles (in collaboration with General Motors), where my specializations are in computer vision, robotics, and machine learning. Previously, I completed my Ph.D. under the supervision of Dr. Laurel Riek at UC San Diego in the Department of Computer Science and Engineering, where I investigated how to enable robots to perceive novel objects. I also earned my M.S. and B.S. degrees in Electrical Engineering at California Polytechnic State University in San Luis Obispo, where my focus was in the design and implementation of mechatronic systems. I am also an avid hardware designer, specializing in embedded systems and electronics.




Patents
A computer vision system that supports fast and scalable pose estimation of electrical connectors in manufacturing automation. Chan, D.M., McAllister, W.S., Lampkins, J.D. US patent application filed/pending.
A computer vision system that supports pose estimation of road signs in autonomous driving. Chan, D.M., Xu, J., Esna Ahshari, A. US patent application filed/pending.
A computer vision and robotic system that supports automated wire insertion into electrical connectors. Chan, D.M., McAllister, W.S., Hoffmann, H. US patent application filed/pending.
A scalable road sign interpretation system that supports autonomous driving. Lampkins, J.D., Chan, D.M., Perry, A., Strelnikoff S., Xu, J. and Esna Ashari, A. US patent application filed/pending.
Publications
Valiente R., Chan, D.M., Perry, A., Lampkins, J.D., Strelnikoff S., Xu, J., Esna Ashari, A. Robust Perception and Visual Understanding of Traffic Signs in the Wild. IEEE Open Journal of Intelligent Transportation Systems 2023.
Lampkins, J.D., Chan, D.M., Perry, A., Strelnikoff S., Xu, J. and Esna Ashari, A. Multimodal Road Sign Interpretation for
Autonomous Vehicles. IEEE International Conference on Big Data 2022
Chan, D.M. and Riek, L.D. (2020). “Unseen Salient Object Discovery for Monocular Robot Vision.” IEEE Robotics and Automation Letters (RA-L). Also appears in ICRA 2020.
Taylor, A., Chan, D.M., and Riek, L.D. (2020). “Robot-Centric Perception of Human Groups.” ACM Transactions on Human Robot Interaction.
Chan, D.M. and Riek, L.D. (2019). “Unsupervised Salient Object Discovery for Robots”. In Proceedings of the Robotics: Science, and Systems (R:SS) Pioneers.
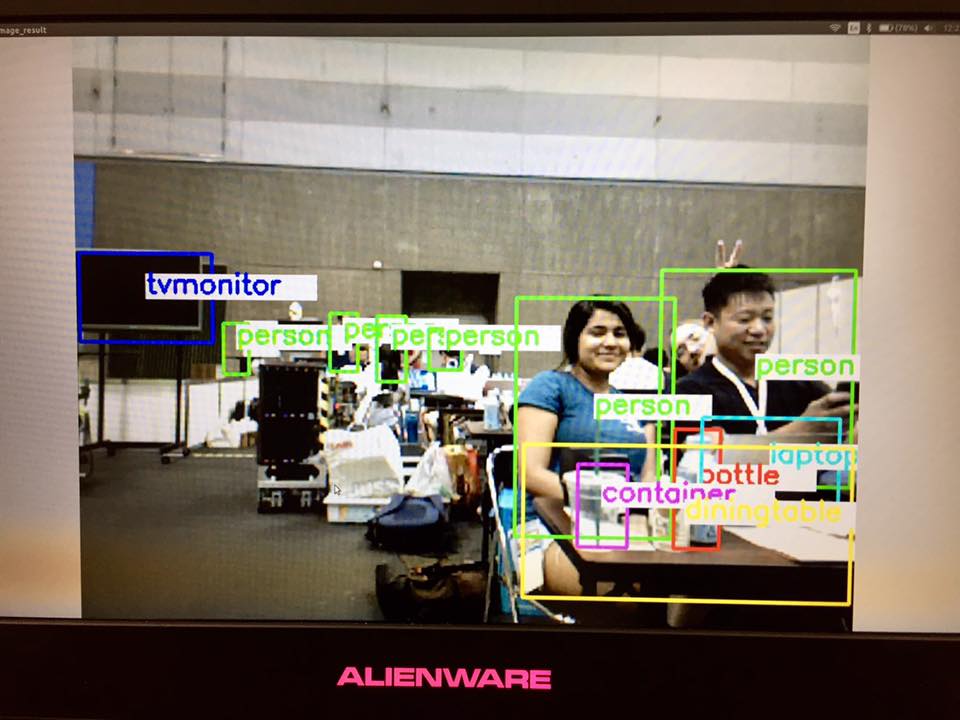
Chan, D.M. and Riek, L.D. (2019). “Object Proposal Algorithms in the Wild: Are they Generalizable to Robot Perception?”. Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
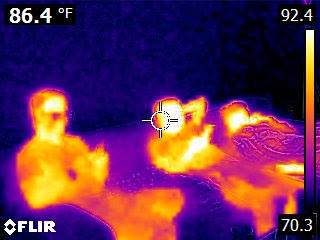
Chan, D.M., Taylor, A., and Riek, L.D. (2017). “Faster Robot Perception Using Salient Depth Partitioning”. Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).